
Next-gen navigation: Tapping signals of opportunity
StoryNovember 21, 2016

Need to navigate and global-positioning system (GPS) signals are unavailable? No problem.
By Sally Cole, Senior Editor
Need to navigate and global-positioning system (GPS) signals are unavailable? No problem.
Amidst increasing concerns about heavy reliance on the U.S. NAVSTAR GPS and global navigation system (GNSS), a team of University of California–Riverside (UCR) researchers has created a navigation system that takes advantage of existing cellular signals –– no GPS signals required.
Led by Zak Kassas, assistant professor of electrical and computer engineering in UCR’s Bourns College of Engineering, the team’s highly reliable and accurate navigation system exploits existing environmental signals of opportunity – cellular or Wi-Fi – rather than GPS signals.
Their technology is being touted as a “standalone alternative” to GPS or as a complement to current GPS-based systems to enable highly reliable, consistent, and tamperproof navigation.
In terms of applications, their method of exploiting signals of opportunity may be used to develop navigation systems capable of meeting the stringent requirements of fully autonomous vehicles – yes, driverless cars and drones.
Today, navigation systems in cars and portable electronics rely primarily on GNSS. But precision military technologies, such as aerospace and missiles, require navigation systems that combine GPS with a high-quality, onboard inertial navigation system (INS) capable of providing backup within GPS-denied areas, whether caused by terrain, jamming, spoofing, or catastrophic GNSS failures. INSs can deliver a high level of short-term accuracy, but it eventually “drifts” when it loses touch with external signals.
During the past few years it’s become increasingly clear that, despite advances in INS technology, today’s GPS/INS systems won’t be able to meet the demands of future autonomous vehicles for several reasons. For starters, GPS signals alone are extremely weak and unusable in terrains such as deep canyons or underwater. GPS signals are also highly susceptible to intentional jamming or unintentional interference. And civilian GPS signals are unencrypted, unauthenticated, and specified in publicly available documents – making them hackable and spoofable.
A current trend for autonomous vehicle navigation systems is to rely not only on GPS/INS but also on several other sensor-based technologies such as cameras, lasers, and sonar.
“Adding more and more sensors allows researchers to throw everything but the kitchen sink at preparing autonomous vehicle navigation systems for the inevitable scenario in which GPS signals become unavailable,” Kassas says. “We took a different approach by exploiting signals already out there in the environment.”
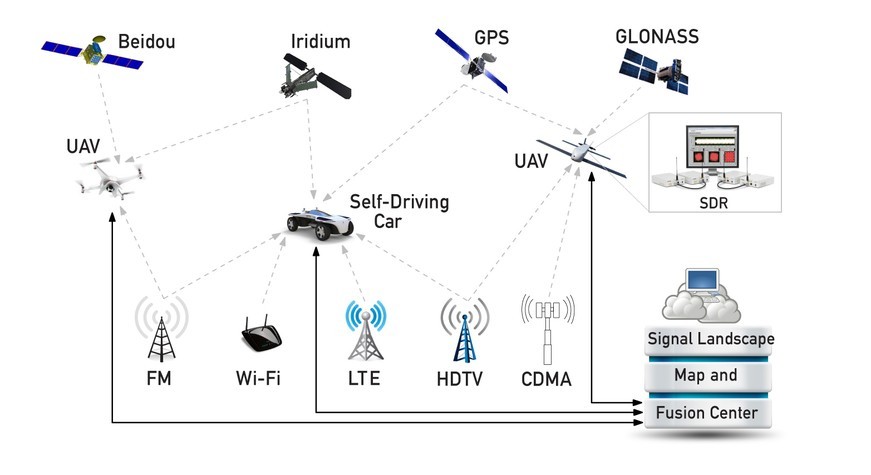
Rather than simply adding more internal sensors, Kassas and his team in UCR’s Autonomous Systems, Perception, Intelligence, and Navigation (ASPIN) Laboratory are developing autonomous vehicles capable of tapping into the hundreds of signals of opportunity around us at any point in time – such as cellular, radio, television, Wi-Fi, and other satellite signals. (Figure 1.)
Figure 1: A schematic showing how researchers at UC Riverside are using existing communications signals to complement satellite-based navigation systems like GPS for the control of driverless cars and unmanned aerial vehicles. Image courtesy of ASPIN Laboratory at UC Riverside.
|
|
The system can be used as a standalone, according to the team, but will more likely be used as a supplement to INS data in case GPS fails.
The team’s end-to-end research approach includes theoretical analysis of signals of opportunity within the environment, building specialized software-defined radios (SDRs) that can extract relevant timing and positioning information from signals of opportunity, developing practical navigation algorithms, and testing the system on ground vehicles and unmanned drones.
“Autonomous vehicles will inevitably result in sociocultural revolution,” Kassas says. “My team is addressing the challenges associated with realizing practical, cost-effective, and trustworthy autonomous vehicles. Our overarching goal is to get these vehicles to operate with no human in the loop for prolonged periods of time, performing missions such as search, rescue, surveillance, mapping, farming, firefighting, package delivery, and transport.”
The team’s research was funded with support from the Department of Defense’s Office of Naval Research.






